Dans PRISME
-
Marche d'un robot humanoïde avec des semelles flexibles et optimisation de leur forme
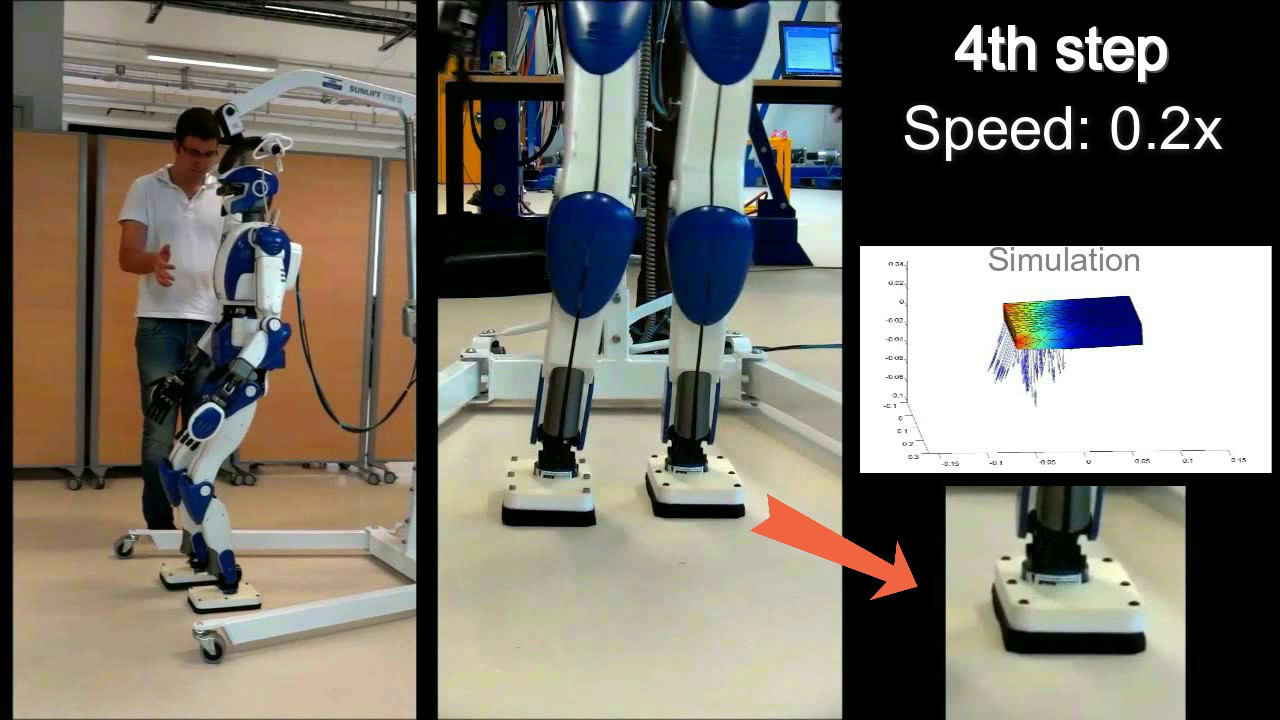

 Vidéo accompagnant le papier RAS sur l'estimateur de déformation ........................Exemples de semelles de formes optimisées..
Vidéo accompagnant le papier RAS sur l'estimateur de déformation ........................Exemples de semelles de formes optimisées..
-
Conception cinéto-statique optimale du robot hybride d'échographie PROSIT-2


 CAO de PROSIT-2.PROSIT-2 final.En prototypage rapide.
CAO de PROSIT-2.PROSIT-2 final.En prototypage rapide.

Vidéo de la cinématique du robot PROSIT-2La structure cinématique a été optimisée en performance cinéto-statiques, encombrement, taille d'espace de travail. Thèse de Christophe Drouin
-
Optimisation de forme de la structure de PROSIT-2

 Résultat de l'optimisation de forme pour une flèche de 1mm sous une force de 30N.Compromi entre rigidité et masse de la structure..
Résultat de l'optimisation de forme pour une flèche de 1mm sous une force de 30N.Compromi entre rigidité et masse de la structure..Optimisé avec le logiciel Optistruct d'Hyperworks. A raideur équivalente, le poids de la structure a été réduit de 28%.
-
Optimisation de forme des corps de robots

Forme optimisée des corps du robot Estele.Optimisation de la forme des corps du robot Estele, robot sphérique sériel. Les corps sont modélisés par un modèle de poutre. Chaque corps est représenté par un empilement de poutres de section constante pour approximer des éléments de section variable. Des sections de type tubes à rayon interne et externe variables sont considérées. Ces rayons internes et externes sont optimisés pour minimiser la masse du robot sous contrainte de non-déformation plastique (contraintes de von Mises inférieures à la limite élastique). Ces optimisations se font pour plusieurs configurations du robot soumis à des forces de 20N sur son extrémité. Dans ces conditions la structure optimisée est extrèmement légère, et montre la nécessité d'optimiser pour plusieurs configurations possibles du robot. IFToMM2011WC

Répartition des contraintes internes de Von Mises dans les corps optimisés du robot Estele.
En post-doctorat
-
Génération de mouvements optimaux pour le robot humanoïde HRP-2
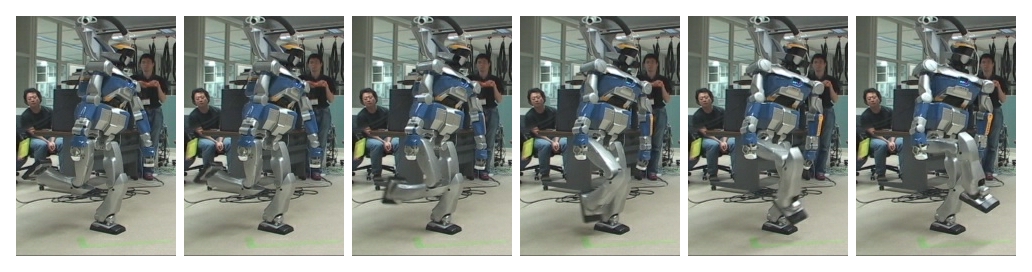
Expérimentation d'un coup de pied optimal
Les mouvements de référence sont définis par des B-splines dont les points de contrôle sont recherchés par le programme d'optimisation.
L'apport essentiel consiste au développement d'une interface traduisant les caractéristiques du mouvement désiré (définition des contacts ayant lieux, des conditions limites, de positions désirées de certains corps en cours de mouvement) en un problème à résoudre par optimisation. Cette interface permet ainsi de changer rapidement de mouvements optimaux recherchés. De nombreuses limitations du robot sont considérées (butées articulaires, limites actionneurs, non décollement et non glissement des contacts), et nous considérons les frottements articulaires non négligeables, avec un modèle régularisé. Cela permet d'obtenir des mouvements aux limites de la capacité du robot, et donc de mieux exploiter les capacités du robot. Nous pouvons donc obtenir des mouvements plus rapides ou consommant moins d'énergie.
L'optimisation de mouvement n'est pas réalisable en temps réel. Pour pouvoir implémenter une réactivité sur le robot, il est possible de constituer hors ligne une base de donnée de mouvements et de composer en ligne l'enchaînement, par exemple pour l'évitement d'obstacles.
La référence RAM2006 présente une pré-étude dans le cas de robots avec des chaînes cinématiques fermées, et ROBIO2006 présente la génération d'un mouvement de coup de pied optimal.
La génération de mouvements optimaux a été appliquée pour un mouvement de lancé (avec Sébastien Lengagne) et pour le soulevement d'un objet de 13kg (avec Hitoshi Arisumi, soumis a IROS'08)

Optimal throwing motion

Optimal lifting motion of 8kg
Videos (divx codec, lisible avec vlc
 et le codec DivX
et le codec DivX  ) :
) :

coup de pied (702 Kb)
ralenti sur la cheville (326 Kb)
lancé (267 Kb)
lancé (185 Kb)
Videos (wmv9 codec, lisible avec Windows Media player.) :
coup de pied (765 Kb)
ralenti sur la cheville (434 Kb)
lancé (161 Kb)
lancé (272 Kb)
-
Téléoperation (avec Paul Evrard, Olivier Stasse, Rio Neo et le LSR )
Nous avons mis en place une expérimentation de téléprésence entre l'université de Munich et le HRP-2 au JRL. Nous avons pour ce faire implémenté des algorithmes d'évitement des butées, de détection de collision et de limitations de vitesse. Une manipulation en télé-coopération a été réalisée pour le déplacement d'un objet. Ce travail a fait l'objet d'un article TeleopPaperIROS2008 et d'une video TeleopVideoIROS2008.
Déplacement d'un objet en télé-coopération : a) approche, b) saisie, c) déplacement, d) pose
En thèse
Robot bipède Rabbit

-
Génération de mouvements périodiques de marche par optimisation non linéaire sous contraintes
Les mouvements de référence sont définis par des polynômes dont les conditions aux limites sont recherchées par le programme d'optimisation.
Les contraintes prises en compte sont les limites articulaires, les limites de couple des moteurs, les conditions de non glissement et non décollement des pieds du bipède. Le critère est énergétique. Un algorithme d'optimisation SQP avec calcul du gradient du critère et des contraintes a été utilisé.
Références miossecPhD , CLAWAR2002, CIFA2002, FMBR2005 et LNCIS2006. -
étude de l'impact du bipède avec le sol
Classification des différents comportements possibles (selon le glissement et le décollement des pieds du bipède).
Le modèle d'impact considéré est celui d'un impact entre corps rigides, et est donc instantané.
Il est ressorti de l'étude que le comportement à l'impact (glissement, décollement des pieds) dépend de la configuration du bipède à l'impact, d'une seule composante de vitesse et de la caractéristique du contact entre le pied et le sol (coefficient de frottement).
Les configurations et vitesses nécessaires pour obtenir le comportement désiré à l'impact ont pu être déterminées par optimisation.
Références miossecPhD -
Mise en place d'une commande sur le bipède pour une phase sous actionnée et une phase sur actionnée sous contraintes
Il a été montré qu'il est nécessaire de prendre en compte les contraintes de non glissement et non décollement des pieds dans la commande. La commande appliquée a été une commande par découplage non linaire avec une saturation des entrées de commande base sur la connaissance du modèle.
Une étude de robustesse face aux erreurs de paramètres inertiels a été menée en simulation.
Références miossecPhD, JDA2003 et JJCR2003. -
Etude de la stabilité de la marche périodique du bipède en considérant des phases sous actionnées et sur actionnées.
Cette étude de stabilité est basée sur la stabilité au sens de Poincaré des systèmes périodiques. Elle est constituée de deux parties.
-
Une première étude de la stabilité des dynamiques non commandées durant la phase sous actionnée en considérant les mouvements de référence des articulations commandées exactement suivies.
Les conditions de stabilité ont été déterminées. Il a été montré que la phase sur actionnée permet de compenser le sous actionnement de la phase sous actionnée de la marche.
Références miossecPhD, IJRR2005 et CLAWAR2003. -
La deuxième étude a consisté en une étude de stabilité quelles que soient les erreurs de suivi du mouvement de référence, mais seulement localement autour du mouvement de réfrence.
Référence miossecPhD et RoMoCo2004.
-
Encadrement d'étudiants
-
Encadrement d'Adrien Escande en DEA puis en thèse sur la génération de points de contact pour un mouvement afin d'atteindre un but.

Séquence de contacts obtenue pour attraper un objet sur une table : contact avec la main, puis les cuisses et perte du contact de la main pour pouvoir atteindre l'objet.Il s'agit d'une problématique nouvelle, l'ensemble des méthodes existantes de génération de mouvements ne tenant pas compte de systèmes pouvant changer de situation de contact, ou travaillant avec des positions et séquences de contacts prédéfinies arbitrairement. Un avantage de l'approche développée est que les points de contacts potentiels ne sont pas du tout choisis à l'avance. Un autre avantage est que l'approche proposée est suffisamment générale pour être étendue la génération de contacts pour des mouvements dynamiques, en considérant des contraintes de stabilité dynamiques du mouvement.
Référence IROS2006
Nous avons également développé une méthode de recouvrement d'objets par des surfaces strictement convexes. Cela permet d'obtenir des distances smooth, et donc de pouvoir utiliser des méthodes d'optimisation classiques pour la génération de postures nécessaire dans la plannification des contacts. La méthode peut aussi être appliquée pour l'évitement de collisions dans l'optimisation de mouvements, et pour la commande d'évitement de collision. La methode est suffisement rapide pour des applications temps réelles.
Référence Humanoids2007, et ITRO
Vidéo présentant la construction d'une STP-BV pour un thétraèdre (placements de petites sphères aux sommets, placement de grandes sphères tangentes aux petites sphères pour chaque face, et enfin liaison entre les grosses portions de sphères par des tores):
 (883 Kb)
(883 Kb)
-
Encadrement de Jean-Remy Chardonnet en DEA puis en thèse sur la simulation du robot HRP2 en utilisant des méthodes par contraintes pour simuler les contacts entre solides rigides.

Simulation par contraintes du HRP-2 attrapant un objet sur une table.Le frottement au niveau des contacts était pris en compte. L'avantage de ces méthodes sur les méthodes par pénalité est qu'elles sont plus stables et ne nécessitent pas l'utilisation d'un pas de discrétisation trés petit pour simuler des contacts trés rigides.
Référence ROBIO2006
-
Encadrement de Sébastien Lengagne sur la génération de mouvements optimaux pour le robot HRP-2 en présence de contacts.
Ce travail s'inscrit dans le cadre de la génération de mouvements de marches et de mouvements entre deux situations de contacts et s'inscrit donc dans le travail de post-doctorat et le travail de thèse sur la génération de points de contacts.
Ce travail consiste essentiellement à rajouter des contraintes de contacts dans la génération de mouvements déjà existante et calculer la répartition optimale des couples pour la chaîne fermée redondante obtenue avec la présence des contacts.
-
Encadrement d'un étudiant en Master sur la simulation d'avatars virtuels EuroHaptics2008, maintenant en thèse sur l'optimisation du temps de réalisation d'un enchaînement de tâches.